缓存
存储型XSS
基础入门
取代LABVIEW
多态和虚函数的使用底层实现原理
四大分析工具
信息系统综合测试与管理
skill command
论文
Java反射
短视频
java-zookeeper
三星卡刷
wx.checkSession
QScintilla
自定义Starter案例实操
插入排序
天际线启发式
短时傅里叶变换
表面检测
Pixhawk
2024/4/14 9:52:30Pixhawk---fatal: Not a git repository (or any of the parent directories)
原文地址为:
Pixhawk---fatal: Not a git repository (or any of the parent directories)当从github.com上面下载下了Firmware后,无意中删除了Firmware目录下的.git文件夹,再去编译就会出现: fatal: Not a git repository (…
Pixhawk Linux下硬件开发环境搭建
本搭建过程基于http://dev.px4.io/starting-installing-linux.html,希望大家互相交流学习。 原文:Development Environment on Linux(Linux上开发环境) We have standardized on Debian / Ubuntu LTS as the supported Linux dist…
MissionPlanner编译过程
环境
windows 10 mission planner 1.3.80 visual studio 2022 git 2.22.0
下载源码
(已配置git和ssh) 从github上克隆源码
git clone gitgithub.com:ArduPilot/MissionPlanner.git进入根目录
cd MissionPlanner在根目录下的ExtLibs文件下是链接的其它github源码࿰…

ardupilot的编译过程
环境
树莓派4b ubuntu20.04 git 2.25.1 python3.8.10 pixhawk2.4.8
下载源码
(已经配置好git环境和ssh)
git clone --recurse-submodules gitgithub.com:ArduPilot/ardupilot.gitcd ardupilotgit status使用git status检查是否下载完整 如果不完整&a…

Pixhawk+PX4+VRPN +NOKOV无人机飞控平台动捕数据传输
NOKOV度量动作捕捉系统可以很好的适配PX4无人机飞控平台。进行数据通信的时候,使用SDK或者VRPN的方式都是可以的。本文演示NOKOV度量动作捕捉系统通过VRPN与PX4平台进行数据传输的方法。
一、硬件准备
1、准备无人机
这里准备的无人机,飞控版是Pixhaw…
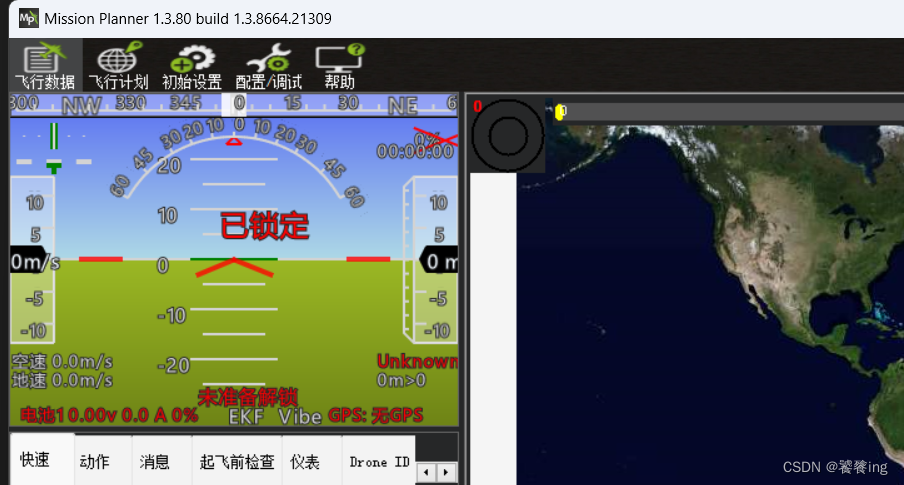
使用mavros在pixhawk和树莓派4B之间通信
环境
windows 11 pixhawk2.4.8 树莓派4B QGroundControl 4.2.8 Mission Planner 1.3.80 ardupilot ubuntu 20.04.2 ros noetic (本人搭建所使用的软件硬件版本,仅供参考)
步骤
pixhawk安装固件(本人使用arduSub 4.2.0)树莓派安装ubuntu20树…
基于Pixhawk和ROS搭建自主无人车(文章链接汇总)
目前更新完第一篇,剩下内容持续更新中… 基于Pixhawk和ROS搭建自主无人车(一):底盘控制篇基于Pixhawk和ROS搭建自主无人车(二):自动航线篇基于Pixhawk和ROS搭建自主无人车(三&#x…
发布一款将APM日志转换为Excel的开源工具
这几年有不少朋友向我咨询如何将APM日志转换为Excel,我之前的答复是先将日志转换为MATLAB的格式,然后用MATLAB导出为Excel。但是实际上不是每个人都会用MATLAB,并且处理数据也不是非要用MATLAB,更不是说用MATLAB了就显得专业、显得…
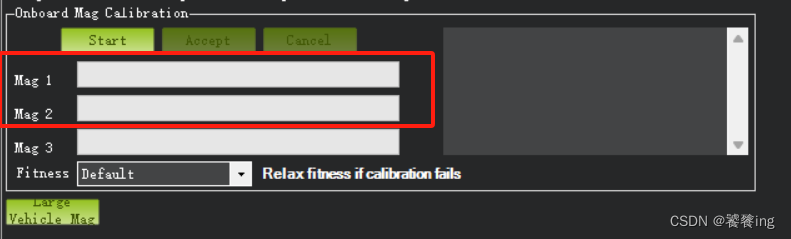
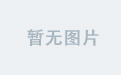
在Mission Planner上校准外置GPS罗盘
环境
windows 11 pixhawk 2.4.8 GPS M8N Mission Planner 1.3.80
前提
已经校准pixhawl自带的加速度计 根据提示,转动pixhawk,按空格键进行下一个步骤,成功后提示success
校准GPS罗盘
pixhawk飞控支持使用双罗盘(也就是内置…
PIX4flow使用记录
想通过I2C直接读取pix4flow的数据,结果不好使,找原因。 找到官网https://pixhawk.org/modules/px4flow#i2c和http://www.pixhawk.com/zh/dev/px4flow,安装了QGC地面站和PX4flow的驱动,详细的如何装驱动https://pixhawk.org/users…